L293d Motor Driver Circuit Diagram Pdf
L293D) solenoids, DC and bipolar stepping motors, as well as. • Peak Output Current 2 A Per. Each output is a complete totem-pole drive circuit. Pin Configuration and Functions. Enable driver channels 1 and 2 (active high input). DC Motor Driver using L293D. This project is a DC motor driver, suitable for motors of low or medium power. Allows controlling up to 6 motors or 3 motors if you want to control the rotation of the motors.
L293 L293 Motor Driver and H-Bridges W. Durfee The most common method to drive DC motors in two directions under control of a computer is with an H-bridge motor driver. H-bridges can be built from scratch with bi-polar junction transistors (BJT) or with field effect transistors (FET), or can be purchased as an integrated unit in a single integrated circuit package such as the L293. The L293 is simplest and inexpensive for low current motors, For high current motors, it is less expensive to build your own H-bridge from scratch. ITP Physical Computing has a on using an Arduino and an L293 to control a bi-directional motor. The Twin Cities Robotics Club has an *excellent*, and complete detail on how to build your own $5.00 H-bridge good for several amps.
From the same source is a detailed tech note on using an H-bridge and a PIC microcontroller The L293 is an integrated circuit motor driver that can be used for simultaneous, bi-directional control of two small motors. Small means small.
The L293 is limited to 600 mA, but in reality can only handle much small currents unless you have done some serious heat sinking to keep the case temperature down. Unsure about whether the L293 will work with your motor? Hook up the circuit and run your motor while keeping your finger on the chip.
If it gets too hot to touch, you can't use it with your motor. (Note to ME2011 students: The L293 should be OK for your small motor but is not OK for your gear motor.) The L293 comes in a standard 16-pin, dual-in line integrated circuit package. There is an L293 and an L293D part number. Pick the 'D' version because it has built in flyback diodes to minimize inductive voltage spikes.
The L293D can be purchased for somewhere between $2 and $3 (quantity one) from (PN 511-L293D) or (PN 296-9518-5-ND). For complete information, consult the Unitrode L293 data sheet (, 626Kb).
A more recent, improved specification, pin-for-pin compatible chip is recommended for new designs: the TI SN754410NE motor driver. Available from mouser.com, Mouser part number 595-SN754410NE, $1.88. Data sheet (, 172Kb). The pinout for the L293 in the 16-pin package is shown below in top view. Pin 1 is at the top left when the notch in the package faces up.

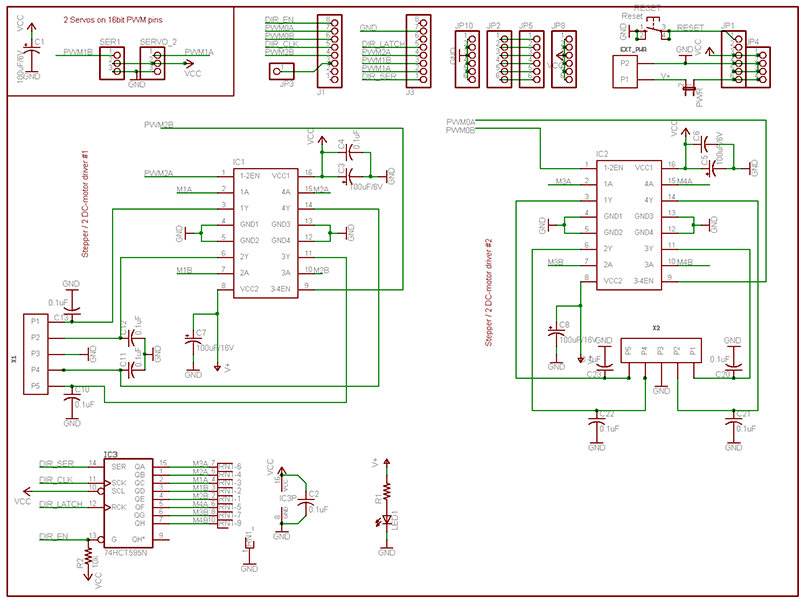
Note that the names for pin functions may be slightly different than what is shown in the following diagrams. The following schematic shows how to connect the L293 to your motor and the Arduino. Each motor takes 3 Arduino pins. (See notes below for a two Arduino pin solution.) If you are only using one motor, leave L293 pins 9, 10, 11, 12, 13, 14, and 15 empty. Nattupura pattu film mp3 song download. Assume you have only one motor connected with the enable tied to Arduino Pin 3, and the two direction controls tied to Arduino Pins 4 and 5. Here is a table describing the control pin functions.
The speed of the DC motor (both directions) is controlled with the 10k potentiometer which is connected to analog channel 0 (A0) and the direction of rotation is controlled with the push button which is connected to pin 8 of the Arduino UNO board. If the button is pressed the motor will change its direction directly. The L293D driver has 2 VCCs: VCC1 is +5V and VCC2 is +12V (same as motor nominal voltage). Pins IN1 and IN2 are the control pins where: IN1 IN2 Function L H Direction 1 H L Direction 2 L L Fast motor stop H H Fast motor stop As shown in the circuit diagram we need only 3 Arduino terminal pins, pin 8 is for the push button which toggles the motor direction of rotation. Pins 9 and 10 are PWM signal outputs, at any time there is only 1 active PWM, this allows us to control the direction as well as the speed by varying the duty cycle of the PWM signal. The active PWM pin decides the motor direction of rotation (one at a time, the other output is logic 0). Arduino code: Arduino code is below.